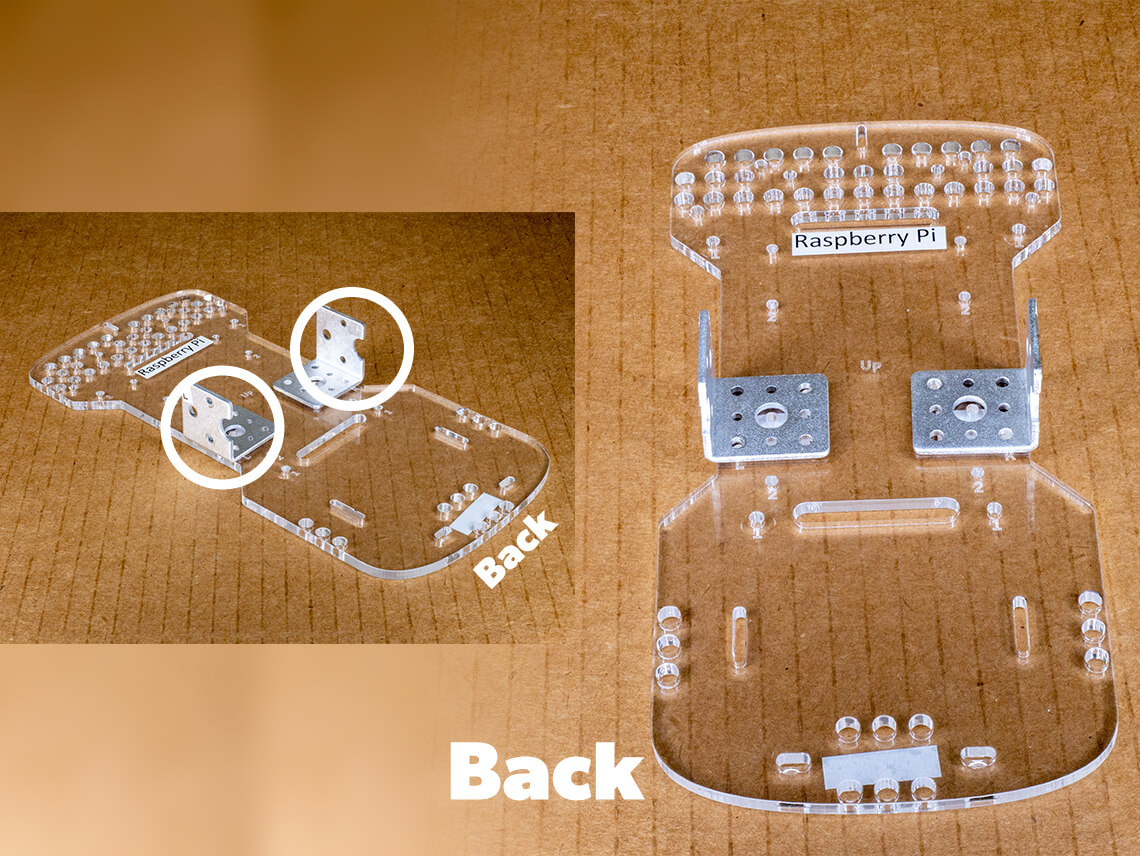
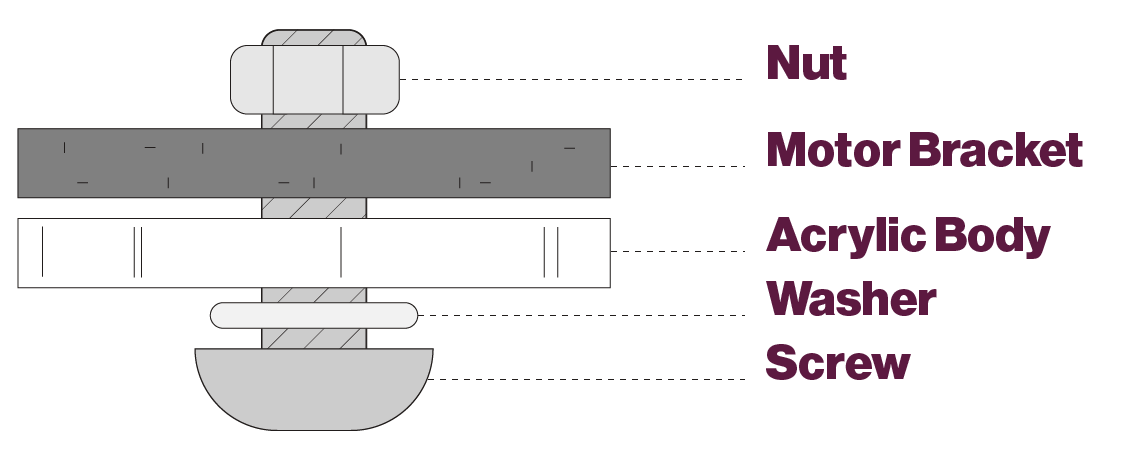
When the nuts have been hand tightened, flip the whole assembly over. The brackets should be touching your building surface. Now use the screwdriver to tighten each screw until the washer is flattened. You might use a pair of needle-nosed pliers to help hold the nuts while you tighten the screws.
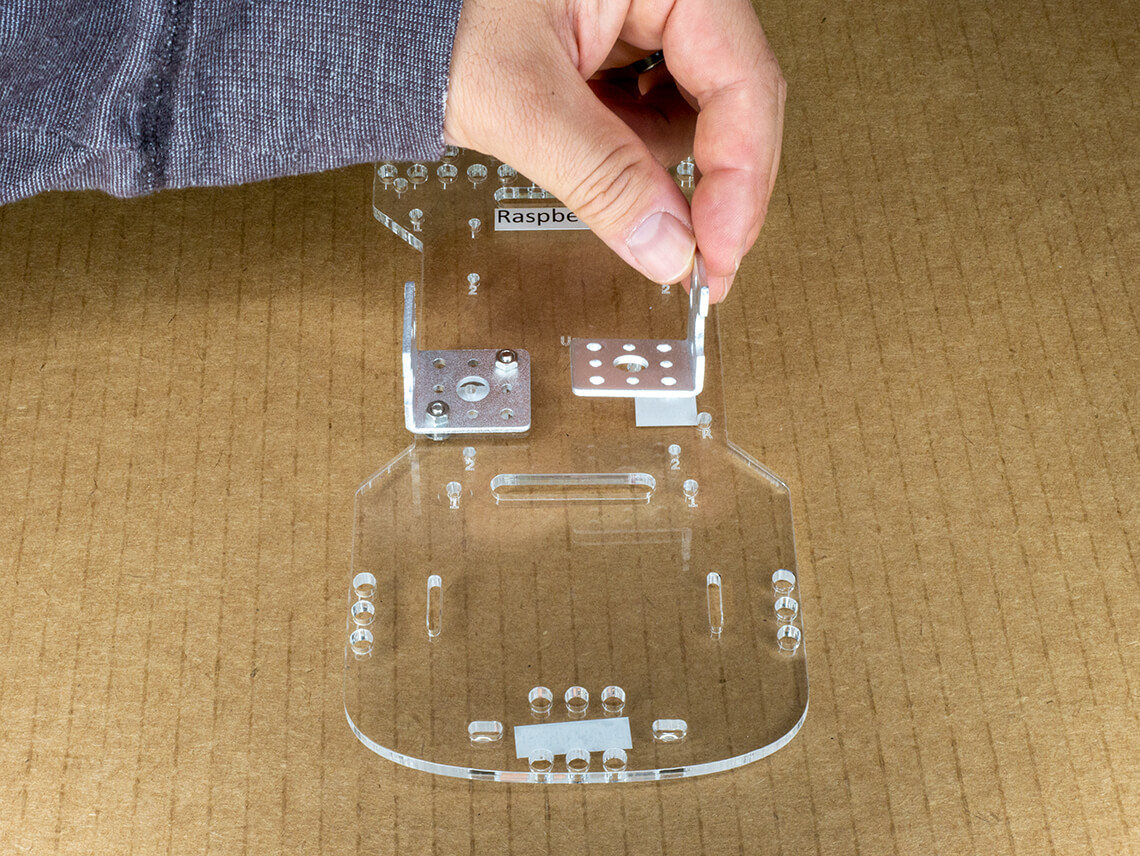
The brackets are now attached to the bottom of the robot.