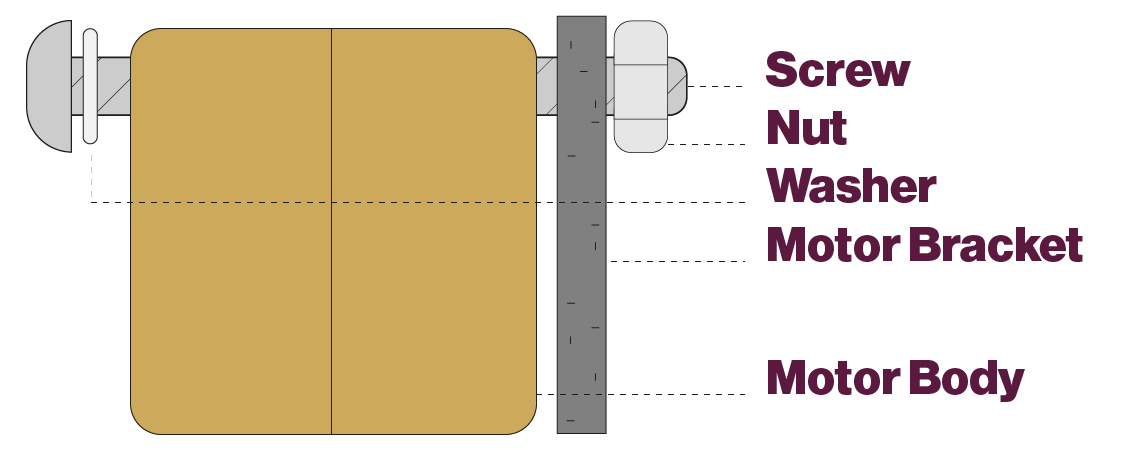
Set each yellow motor inside a motor bracket.
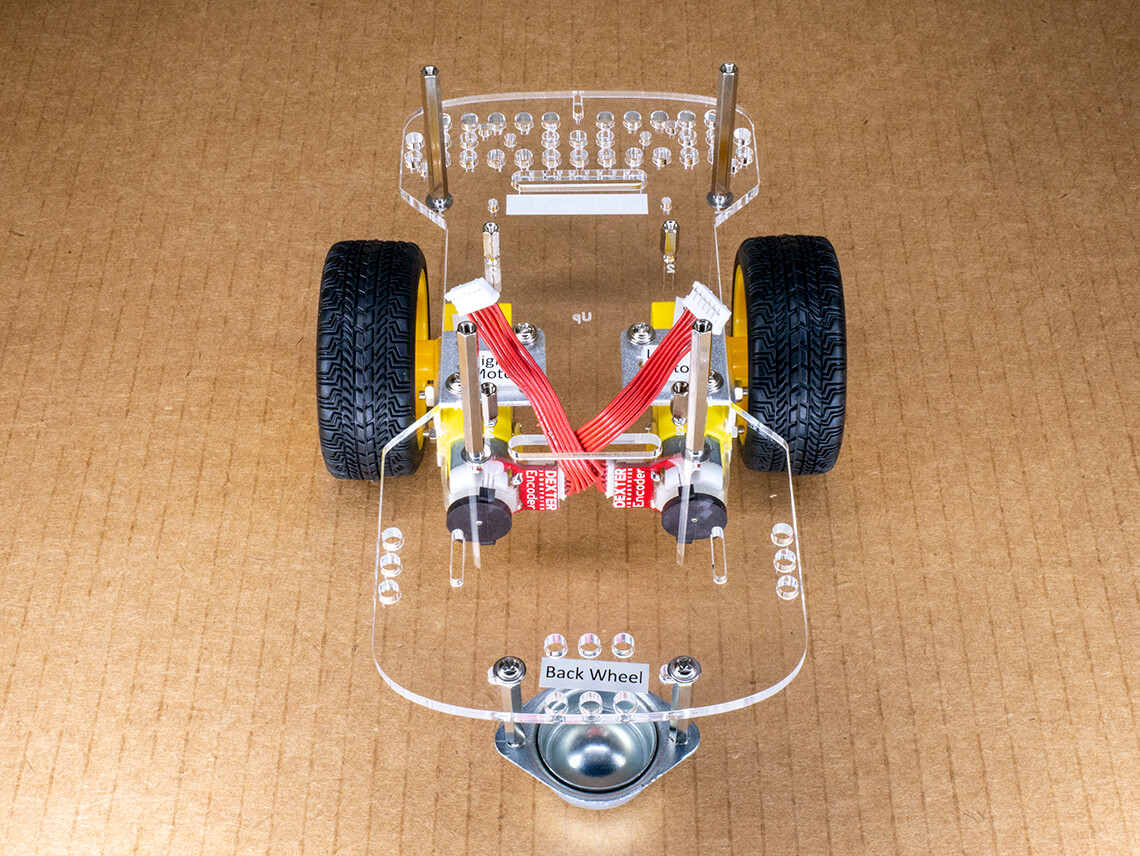
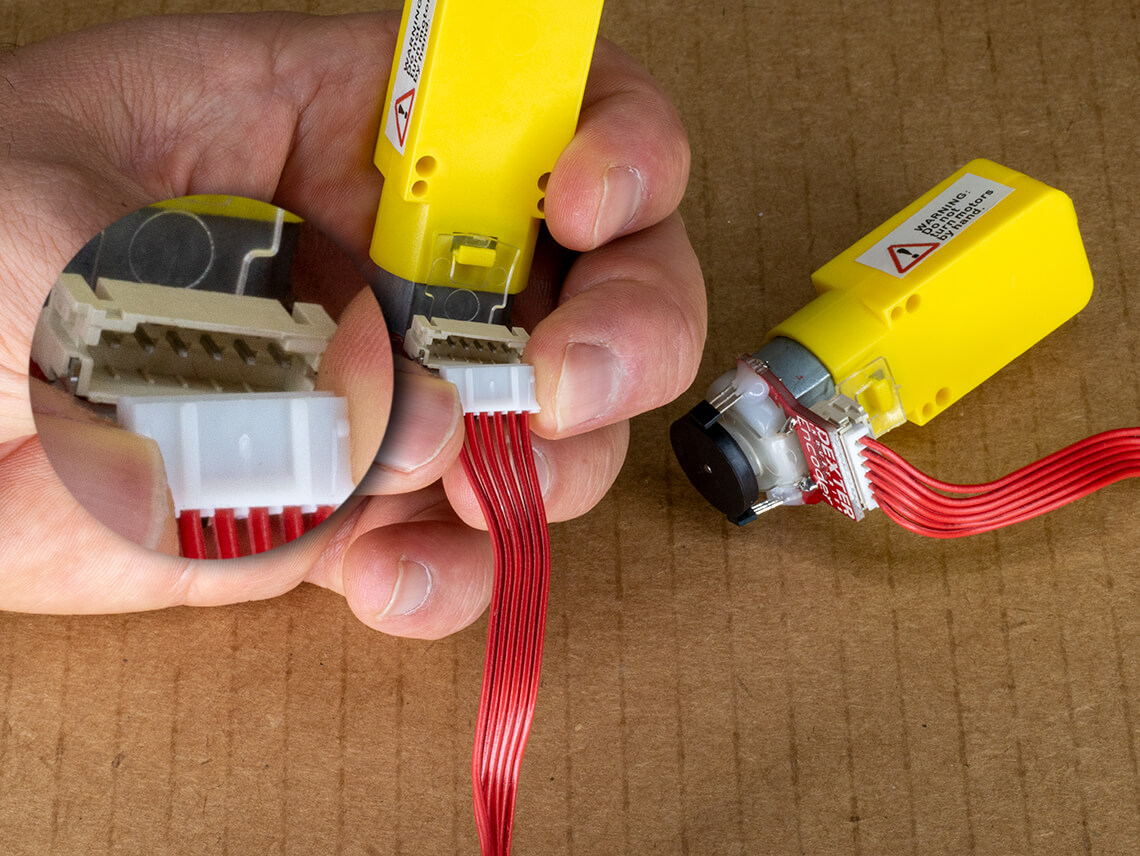
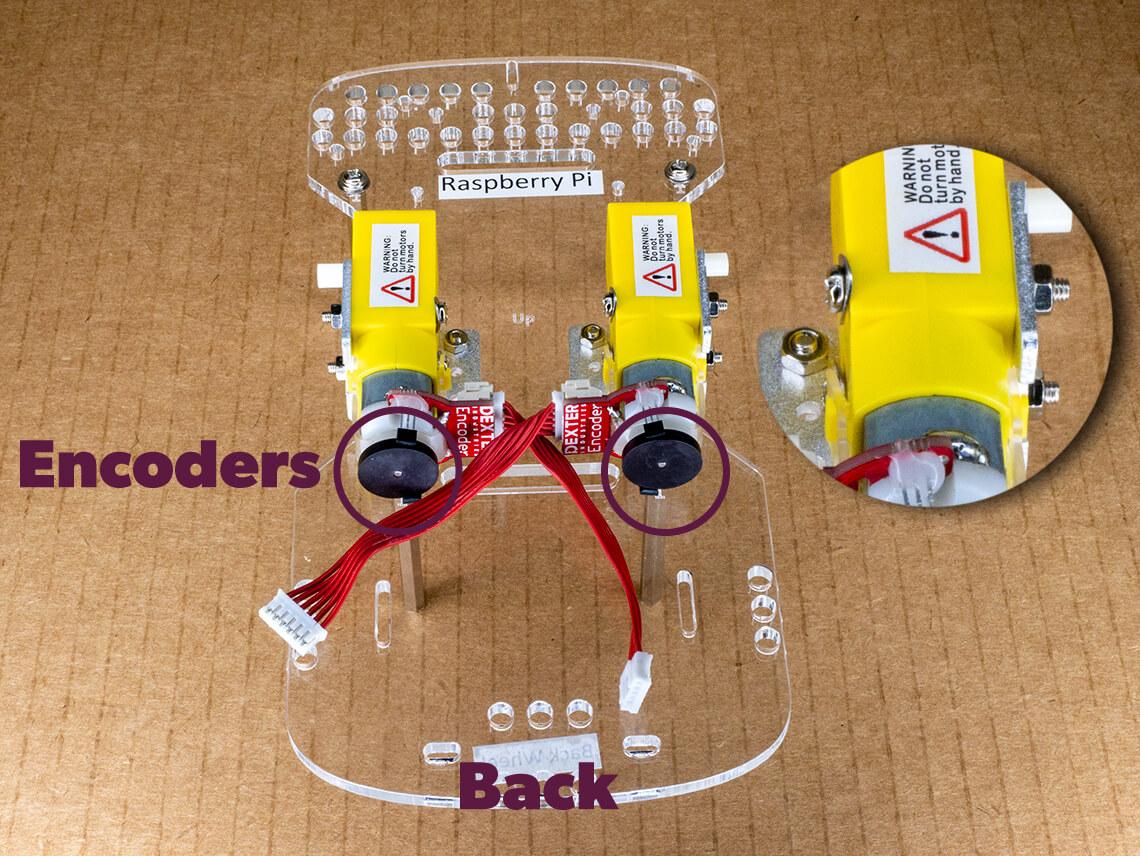
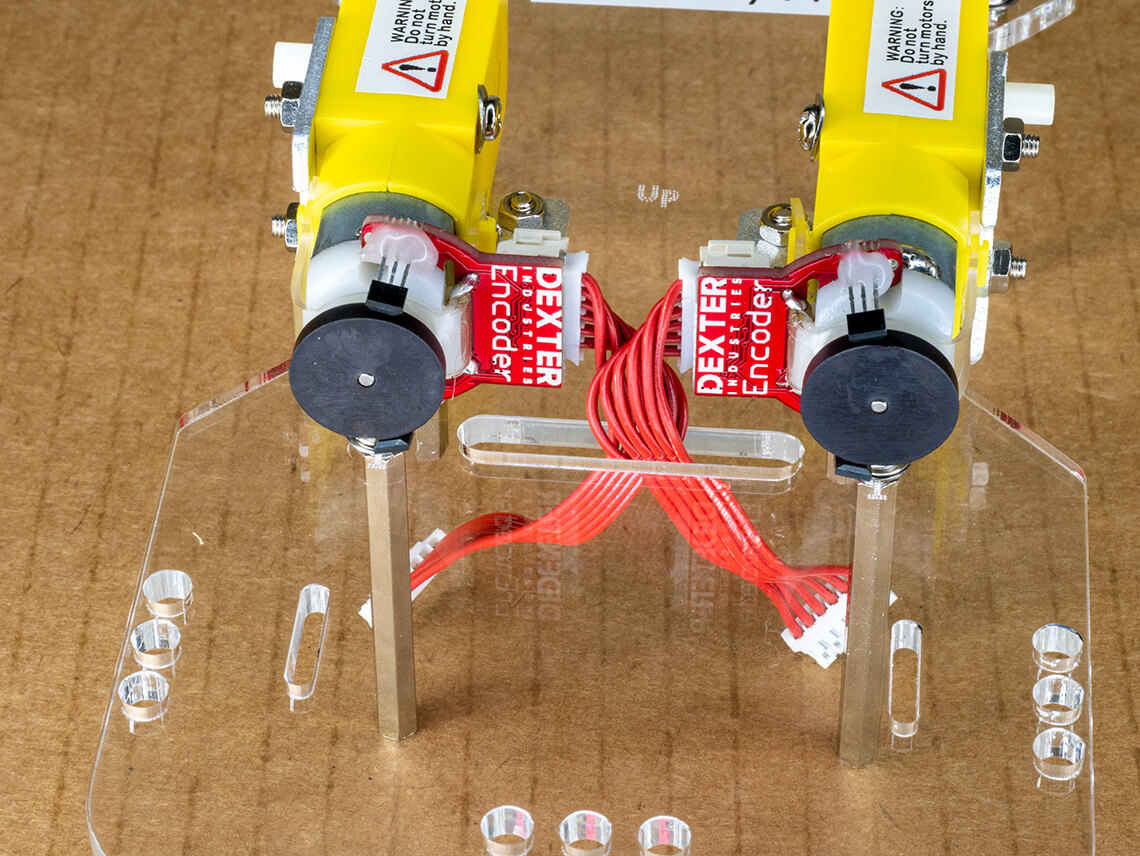
The red wires should be facing inward, nearly touching each other.
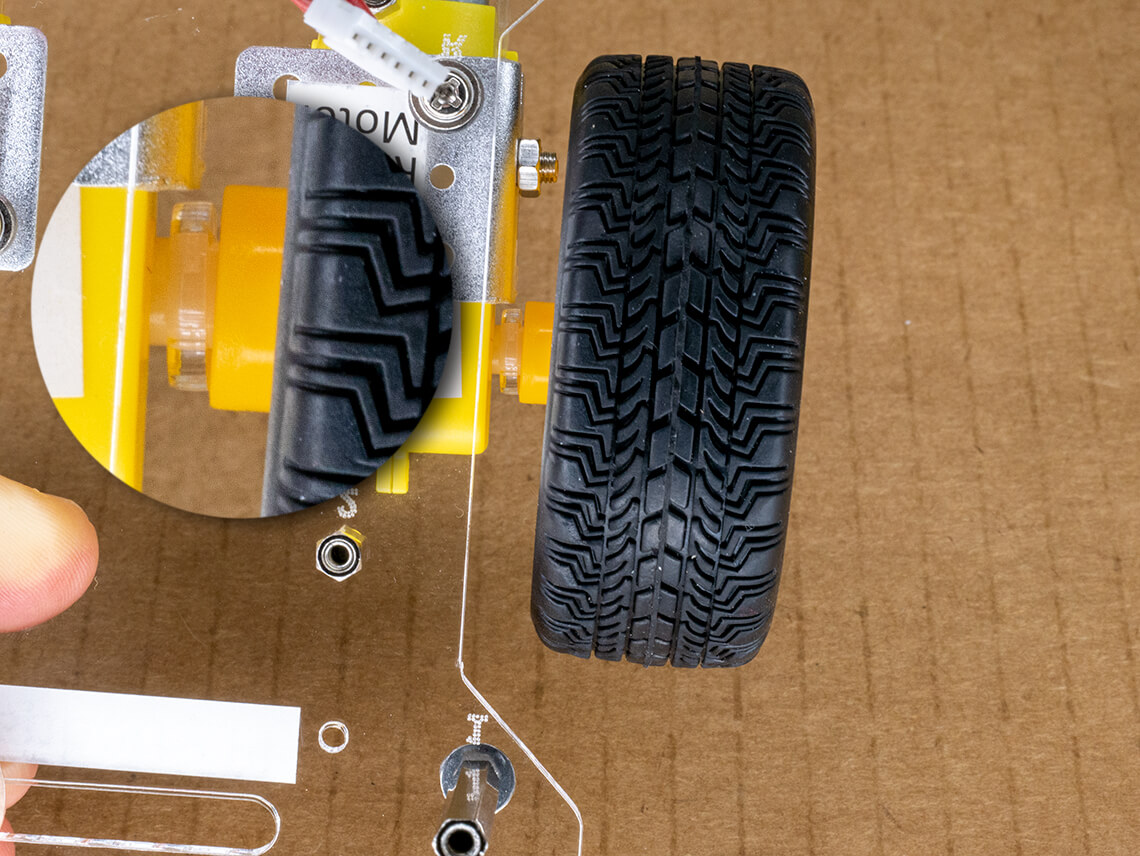
The ends of the screws should fit through the motor bracket and extend beyond the edge of your robot.
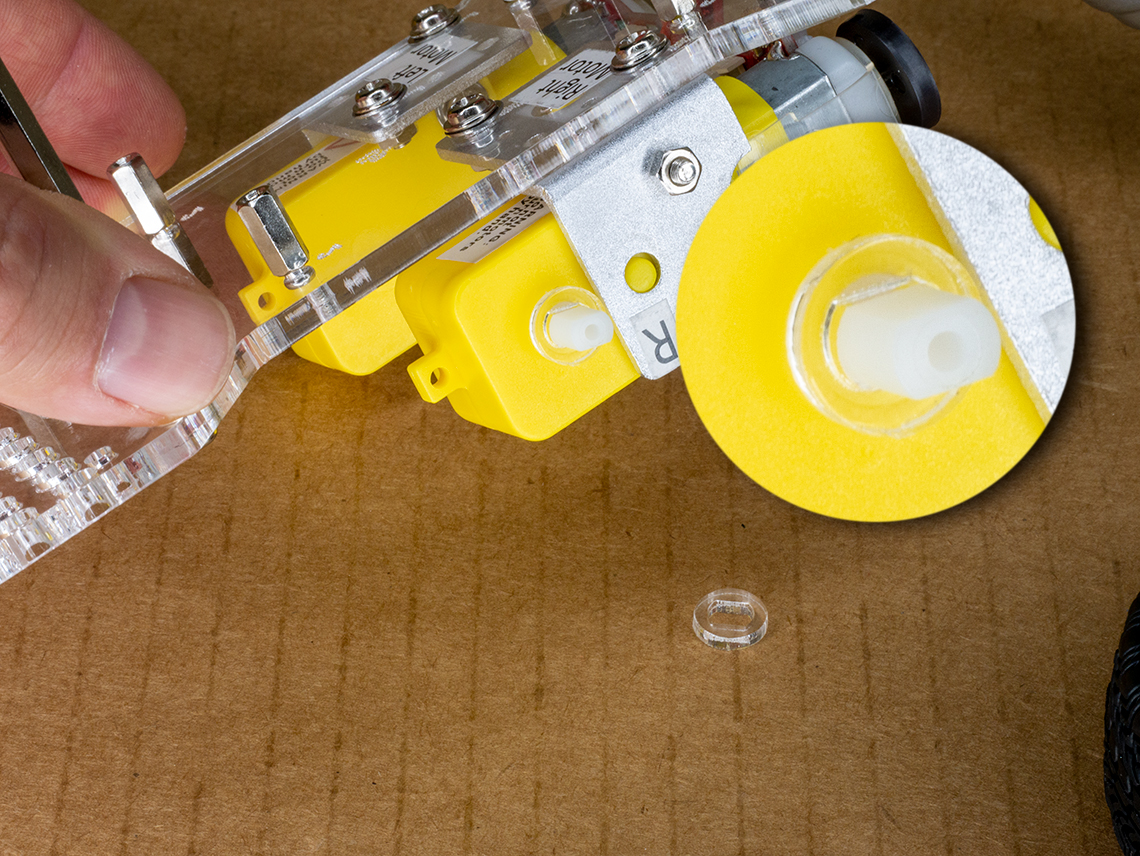
To check your work, make sure the black circle encoders are facing the back of the robot.